The Robotics and Automation Lab at Wilkes University is a state-of-the-art facility that provides students with the opportunity to design, build, and program mobile robots and industrial robotic arms.
Located in Stark Learning Center, the lab integrates interdisciplinary learning in mechanical engineering, electronics, and control systems. Unique features include projects such as programming an autonomous maze-navigating robot and operating an ABB IRB120 robotic arm, widely used in the automotive industry.
With specialized equipment like collaborative robots, quadrupedal robot dogs, and programmable logic controllers (PLCs), students gain hands-on experience in robotics applications, including those relevant to self-driving electric vehicles.
This lab serves as a platform for innovation and practical learning, preparing students for advanced research and industry challenges.
Key Features
- The IRB 120 robot (Figure 1) provides an agile, compact and lightweight solution with superior control for a host of robotics teaching and research projects. It is the smallest ever 6-axis robot with a standard payload of 6.6 lbs and a reach of 580mm, weighing just 55 lbs. Students use this robot to learn kinematics, dynamics, control and robot programming.;
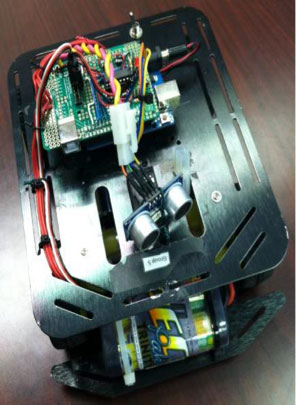
- Students designed autonomous maze navigating mobile robots (Figure 2).
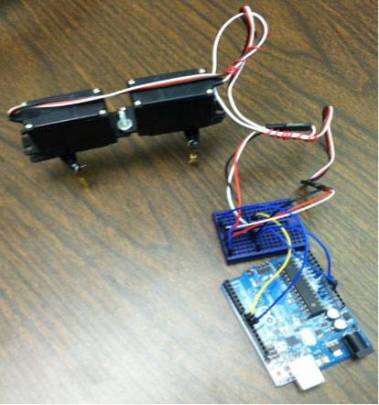
- Using servo motors/Arduino microcontroller, students built small walking robots (Figure 3).
- Allen-Bradley PLC system (Figure 4) teaches students PLC programming and industrial automation systems.
- Eight engineering lab stations (Figure 5) include oscilloscopes, multimeter, DC power supply and function generator.
- The IRB120 robot is essential for teaching the fundamentals of robot manipulator kinematic, dynamics, control and programming needed in regional and national manufacturing ecosystems, such as food and beverage, pharmaceutical, packaging, automotive and solar photovoltaic manufacturing.
- This lab provides considerable undergraduate research opportunities and senior design robotic projects to instill essential skills required by industry. Our students participate in national and international robotics competitions.